
当前位置:首页 > 产品中心























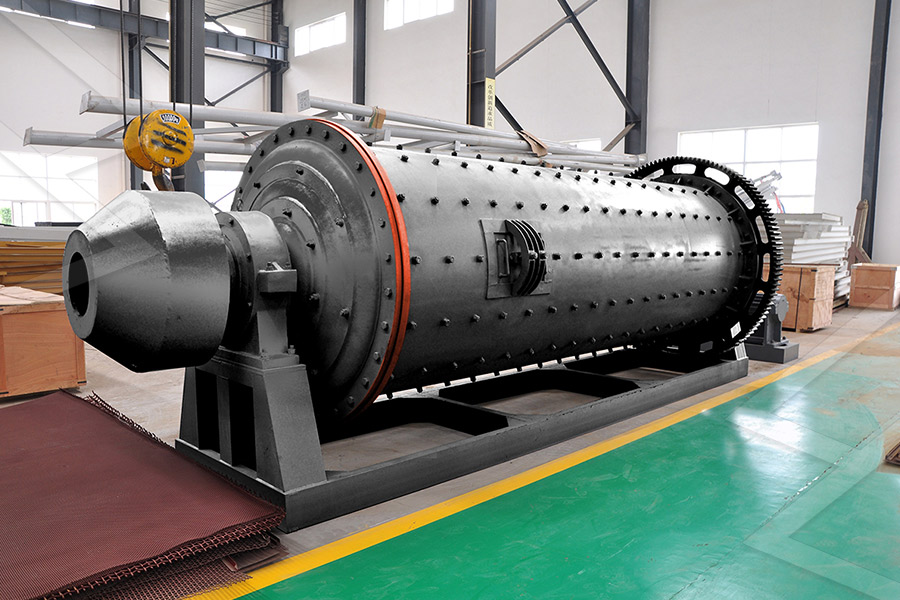



















煤矸石机械
.jpg)
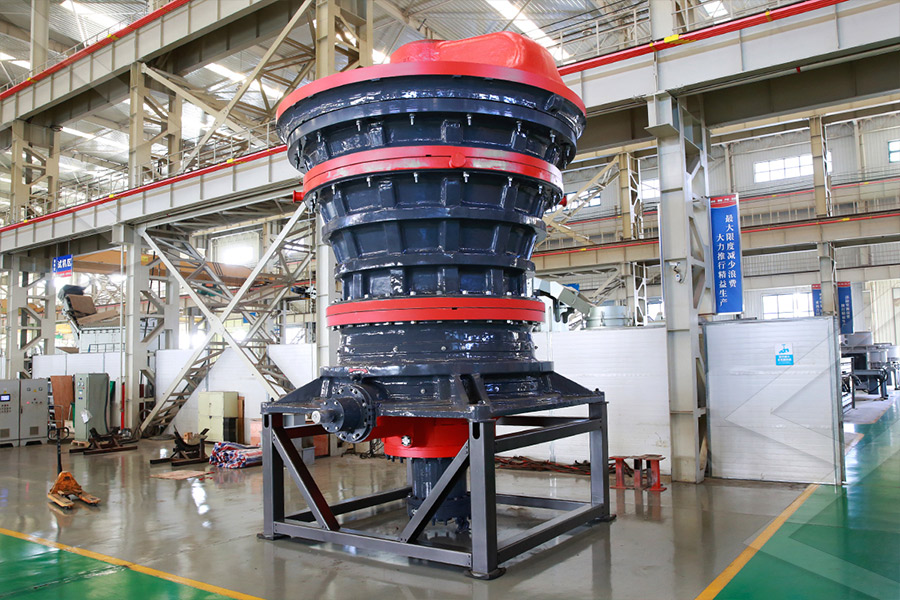
TGS智能选矸机器人
11 行 本产品运用机器视觉、深度网络学习等人智能技术,结合传统机械、电控等技术,可实现煤矿煤矸石分拣的智能化,适用于30050mm的块煤分选,可代替手选、动筛跳汰机、浅槽分选机等。阐述了煤矸分拣机器人的工作原理和设计方案,针对煤矸分拣的特定工况场景,对工业相机、光源、镜头等图像识别系统的硬件进行了选型设计。煤矸分拣机器人设计与关键技术分析
.jpg)
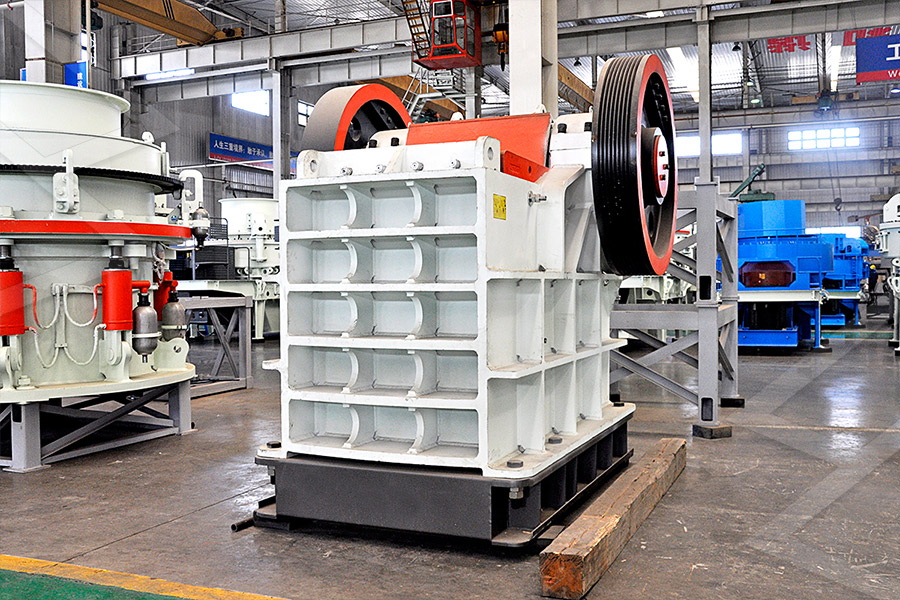
智能选矸机器人关键技术研究
结合现场应用和机器人智能化发展需求,指出了智能选矸机器人今后的研究方向:针对现场复杂环境进行技术改进,提高煤矸识别算法的鲁棒性和自适应性;适应复杂环境的智能感 2022年11月5日 样机实验结果表明,双机械臂煤矸石分拣机器人可对粒度为50~260 mm的煤矸石进行高效、快速分拣,所采用的煤矸石识别方法和分拣策略在不同带速下具有良好的稳定性和准确性。基于机器视觉的多机械臂煤矸石分拣机器人系统研究

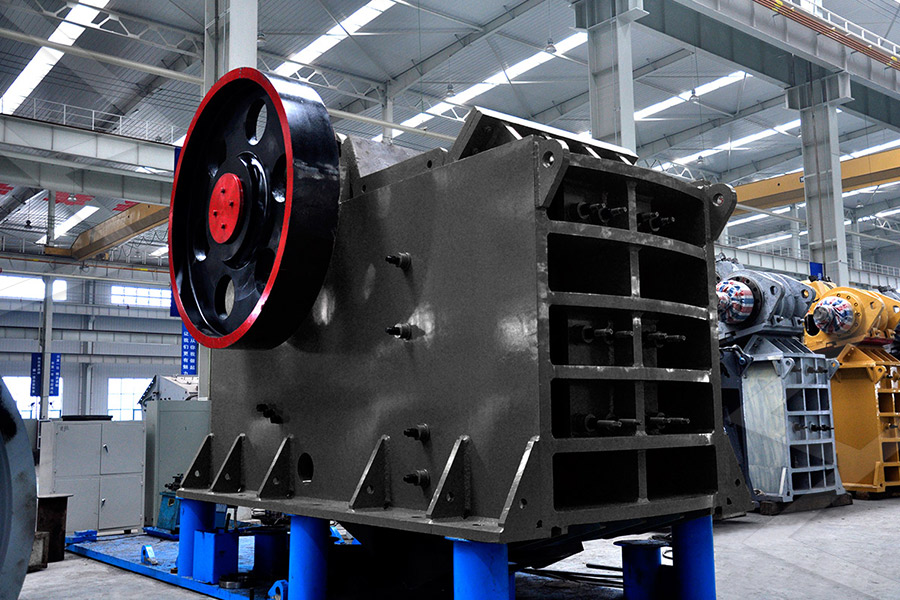
基于强化学习的煤矸石分拣机械臂智能控制算法研究
煤矸石分拣是煤炭粗选的首要环节,也是提高煤炭质量以及矿井效益的重要方法 [1] 。 传统煤矸石分拣如人工分拣、湿选和干选等分拣方式正面临工伤风险率高、环境污染严重及智 现场工业性试验研究结果表明,针对三大关键共性技术所提出的方法能够有效破解煤矸石高效识别和抓取特征提取、机械臂动态目标同步跟踪稳定抓取、多机械臂高效协同分拣等难 多机械臂煤矸石智能分拣机器人关键共性技术研究

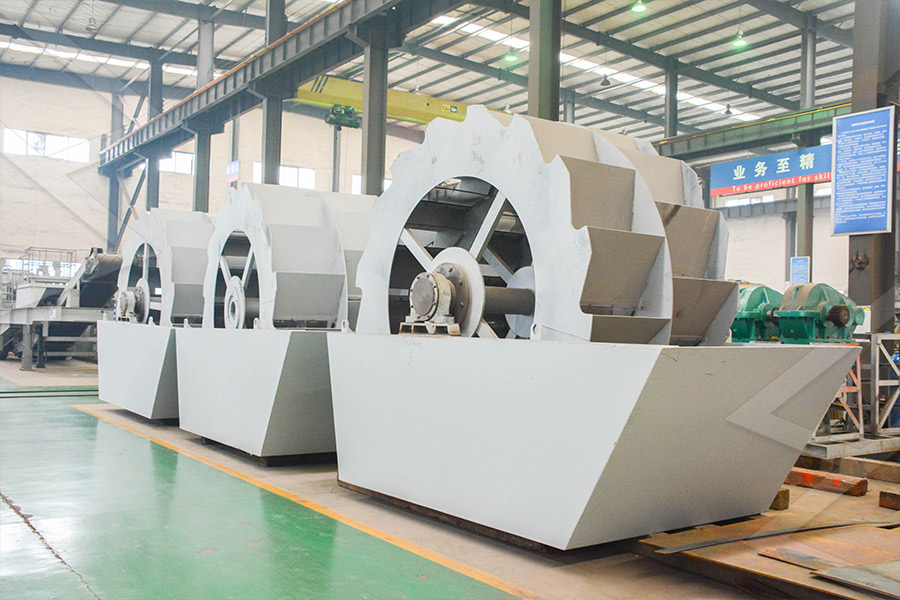
多机械臂煤矸石智能分拣机器人关键共性技术研究
多机械臂煤矸石智能分拣机器人关键共性技术研究 依据我国煤矿智能绿色发展战略,深入分析了国内外智能拣矸系统的研究现状,指出研发适用于井下的多机械臂煤矸石智能分拣机器 基于机器视觉的多机械臂煤矸石分拣机器人系统研究 摘要 现有煤矸石分拣方法主要是根据煤和岩石的纹理特征值,利用图像处理和模式识别技术对煤矸石进行识别分选,分选的煤矸石 基于机器视觉的多机械臂煤矸石分拣机器人系统研究